Next: 4.6.2 RGS Multipointing Mode (MPM) Up: 4.6 Observing modes Previous: 4.6 Observing modes
Along the mission a number of scientific cases have been identified where the goal requires the observation of sky regions larger than the field of view of the EPIC cameras (galaxy clusters, supernova remnants, crowded fields, solar system objects). Since no raster, dithering or tracking modes were included in the original design of XMM-Newton, a target region larger than the field of view can only be achieved by a series of individual, independent observations, each having its own operational and instrument overheads (§ 4.5.1 and 4.5.2). For programmes not requiring long integration times per pointing, these overheads may reduce significantly the observing efficiency, especially for EPIC-pn.
The Mosaic mode has been defined to keep a high observing efficiency when large fields are observed for relatively short integration times. This is done, basically, by suppressing the upload (for MOS) and calculation (for pn) of the EPIC offset tables8 at every pointing, except in the first one of a series of consecutive, adjacent pointings.
The detailed strategy is as follows: a number of nearby pointings are scheduled consecutively; at the first attitude of the sequence fixed offset tables are uploaded for MOS cameras and an offset table is specifically computed for pn with the filter wheel at the CLOSED position; once the EPIC filters selected by the PI are set, the exposures in all EPIC and RGS instruments are started and continued uninterruptedly until the end of the last pointing of the series.
Since MOS cameras are already operated with fixed offset tables, the new mode has no noticeable effect on the quality of their data products. The offset table computed for pn through the filter CLOSED may result in a degraded spectral resolution for sources producing a non-negligible optical loading. Nevertheless, the effect can be suppressed with the selection of the adequate filter, with the exception of sources extremely bright in the optical. The only restriction to the EPIC filters is that they cannot be changed while completing the pointings series. Different EPIC cameras may use different filters, but they all must be set in Full Frame mode.
Additional constraints exist for the angular distance between consecutive pointings and the duration of individual pointings. The former cannot exceed 1 degree, so that the duration of the re-pointing slews is fixed. On the other hand, the angular distance cannot be shorter than 12 arcsec as required by the accuracy of the slews and of the attitude reconstitution, the pixel size of the cameras and the PSFs of the telescopes. As to the duration of the individual pointings, the minimum and maximum operational efficiency are reached for exposures corresponding to 2 and 15 ks respectively.
As for any other observation, the total duration of any Mosaic observation
( ) is limited to the visibility of the target region within a
single orbit.
) is limited to the visibility of the target region within a
single orbit.
The total duration of a Mosaic observation made by  pointings each with
duration
pointings each with
duration  can be obtained by:
can be obtained by:

where  is the time needed to configure the EPIC cameras at the
beginning of the observation and
is the time needed to configure the EPIC cameras at the
beginning of the observation and  is total time required for
performing slews between consecutive pointings. includes, among
other, the time for computing the pn offset table and uploading the
corresponding MOS tables. is the sum of the time required for a
re-pointing slew and for the mapping of the Star Tracker field of view that
follows every slew. Values for these parameters at the time of writing this
Handbook are:
is total time required for
performing slews between consecutive pointings. includes, among
other, the time for computing the pn offset table and uploading the
corresponding MOS tables. is the sum of the time required for a
re-pointing slew and for the mapping of the Star Tracker field of view that
follows every slew. Values for these parameters at the time of writing this
Handbook are:
 ks and
ks and  ks of which 450 s are
for the slew and 750 s are dedicated to the mapping.
ks of which 450 s are
for the slew and 750 s are dedicated to the mapping.
When preparing Mosaic observations, the overhead is calculated as the
difference between  and
and
 . This means that both
and
. This means that both
and
 are considered as overhead. It should
be noted, however, that the instruments are collecting science data during
every re-pointing slew and mapping.
During Star Tracker mapping the AOCS operate differently than during stable pointings
and the accuracy of the attitude reconstitution has not been fully assessed:
for this reason data collected during Star Tracker mapping are considered as overhead.
However, the stability of the spacecraft is not significantly worse than during stable pointings,
and therefore these data may be scientifically useful.
are considered as overhead. It should
be noted, however, that the instruments are collecting science data during
every re-pointing slew and mapping.
During Star Tracker mapping the AOCS operate differently than during stable pointings
and the accuracy of the attitude reconstitution has not been fully assessed:
for this reason data collected during Star Tracker mapping are considered as overhead.
However, the stability of the spacecraft is not significantly worse than during stable pointings,
and therefore these data may be scientifically useful.
Astronomers willing to
propose for Mosaic observations can justify in their proposals
that, in addition to the science data (
), they plan to use
data obtained during Star Tracker mapping, should this be valid for their scientific aims.
They can therefore argue that for their purposes
the true overhead may be smaller than the defined mosaic overhead.
The effective integration time at a given location in the target region depends on the individual pointing duration, but also on the offsets and on the vignetting of the telescopes. All these factors need to be carefully considered in the design of a Mosaic observation.
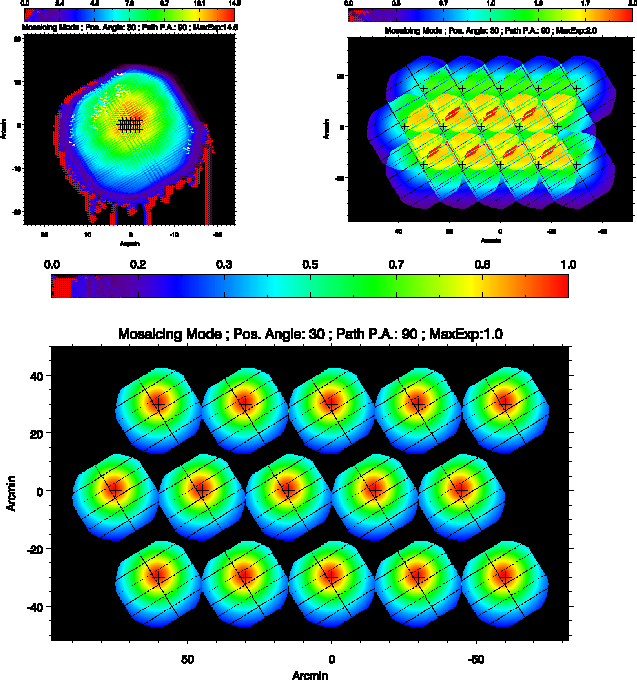 |
An exposure map simulator tool is available under the link:
http://www.cosmos.esa.int/web/xmm-newton/epic-mosaic.
In Mosaic mode observations it is possible to include OM exposures, but only during stable pointing periods avoiding re-pointing slews.
It has to be remarked that the Mosaic observing mode is not a new operating mode of the instruments, except for the offset table used in the EPIC-pn exposures. Therefore, the descriptions of the instruments in § 3 are all applicable, including the recommendations, caveats, warnings, alerts and restrictions.
European Space Agency - XMM-Newton Science Operations Centre
